bayesian-attractor-model-python-cpp-
“bayesian-attractor-model-python-cpp-“ is a program that implements the core functions of Yuragi learning [1] using Python. To speed up the program, I wrote the core functions in C++ and created a simple interface program written in Python using pybind11.
According to Book [1],
Yuragi, which is the Japanese term describing the noise or fluctuations
“Yuragi learning” is a new artificial intelligence paradigm that models the top-down learning mechanism of the human brain. The core functions of Yuragi learning are “Perception of Observation,” which is based on the Bayesian attractor model [2].
Requirement
bayesian-attractor-model-python-cpp- used Eigen and pybind11.
Eigen
Eigen is “a C++ template library for linear algebra: matrices, vectors, numerical solvers, and related algorithms.” To install it, run:
git clone https://gitlab.com/libeigen/eigen.git
and copy the Eigen directory into the same directory where bam-module.cpp is placed.
pybind11
pybind11 is “a lightweight header-only library that exposes C++ types in Python and vice versa, mainly to create Python bindings of existing C++ code.” To install it, run:
pip install pybind11
Compile
(Environments under Ubuntu 20.04 is tested)
To compile bam-module.cpp and create a library file (bam-module.so), run:
g++ -O3 -shared -std=c++11 -fPIC `python3 -m pybind11 --includes` bam-module.cpp -o bam_module.so
Description
- bam-module.cpp
- This program implements the Bayesian attractor model [2].
- It takes multidimensional series data as input and outputs a confidence level indicating which of the pre-stored alternatives is most similar to.
- global.h
- Global variables are defined in this file.
- const.h
- Constant variables are defined in this file.
- Yuragi_sample.py
- This Python program is a sample program that uses the functions provided in the Bayesian attractor model program written in C++.
- First, it creates an instance of the Bayesian attractor model class written in C++:
BAM = bam_module.bam(3, 3, 2, 1)- Then, call methods of bam-module.cpp
- BAM.set_k_dim sets the number of attractors.
- BAM.set_f_dim sets the number of dimensions of a feature.
- BAM.set_norm_prm sets the parameters for data normalization.
- BAM.set_q sets the dynamics uncertainty of BAM.
- BAM.set_r sets the sensory uncertainty of BAM.
- BAM.upd_f sets features to attractors.
- BAM.ukf_z inputs observations into the Bayesian attractor model and calculates the decision variables.
- BAM.get_z outputs the decision variables in the Bayesian attractor model.
- BAM.get_p outputs the variance-covariance matrix of the current decision variables.
- BAM.get_c outputs the confidence values in the Bayesian attractor model.
- BAM.msg_on turns on/off display of debug messages.
Yuragi example
To run the Yuragi_sample.py, type the following command:
python Yuragi_sample.py sample_feature.txt sample_input.txt sample_norm.txt
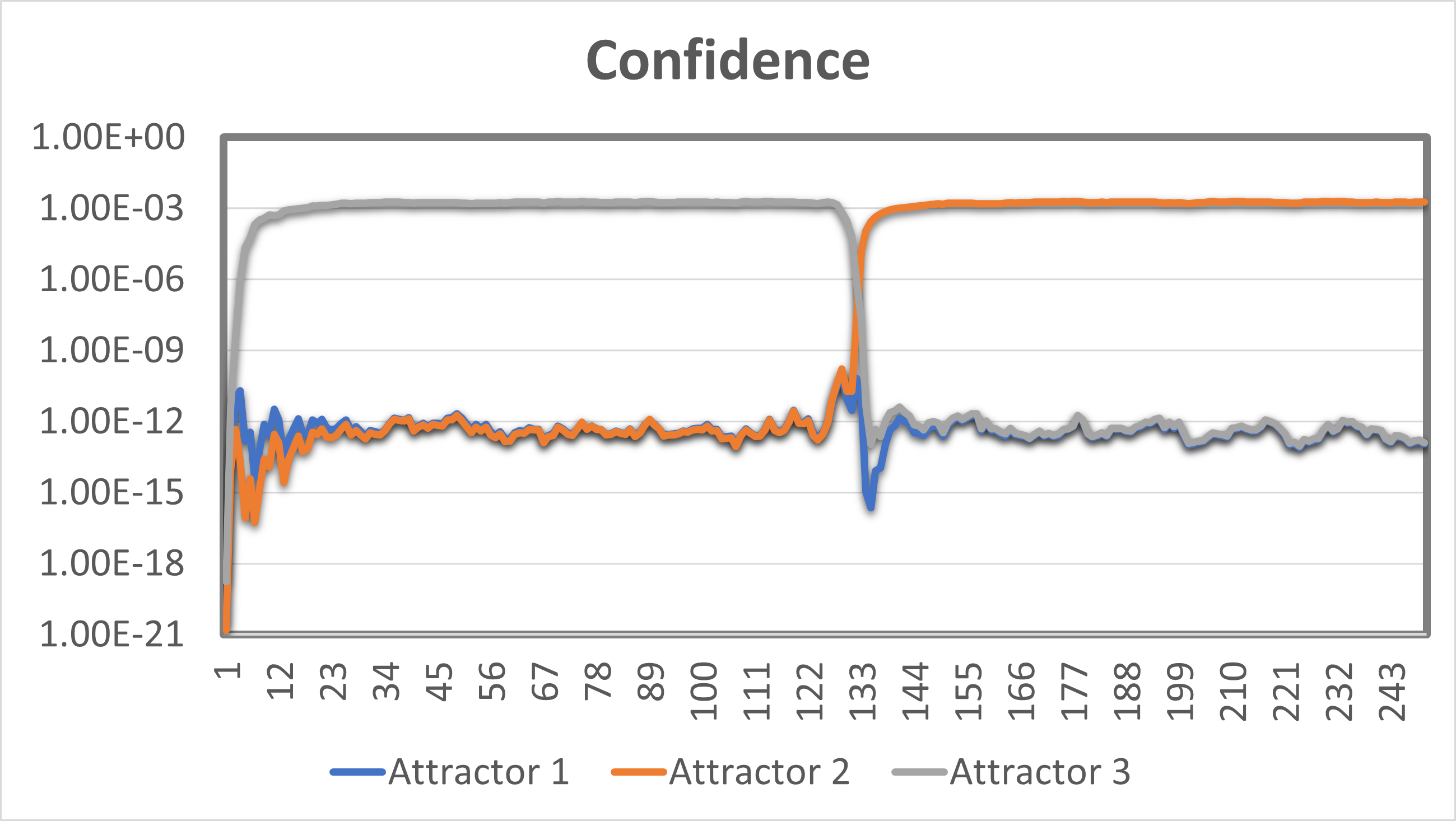
This command will generate a file called “res.csv” that contains the confidence level of how similar the input series is to the features listed in each line of the “sample_feature.txt” file.
The input series are 3-dimensional data X = (x_1, x_2, x_3) where x_i = (1+r_1, 1+r_2, -1+r_3) and r_1, r_2, r_3 ~ Uniform(-1,1). The three attractors store (1, -1, -1), (-1, 1, 1), and (1, 1, -1) respectively. In time step 1–125, (x_1, x_2, x_3) = (1, 1, -1) and after that (x_1, x_2, x_3) = (-1, 1, 1).
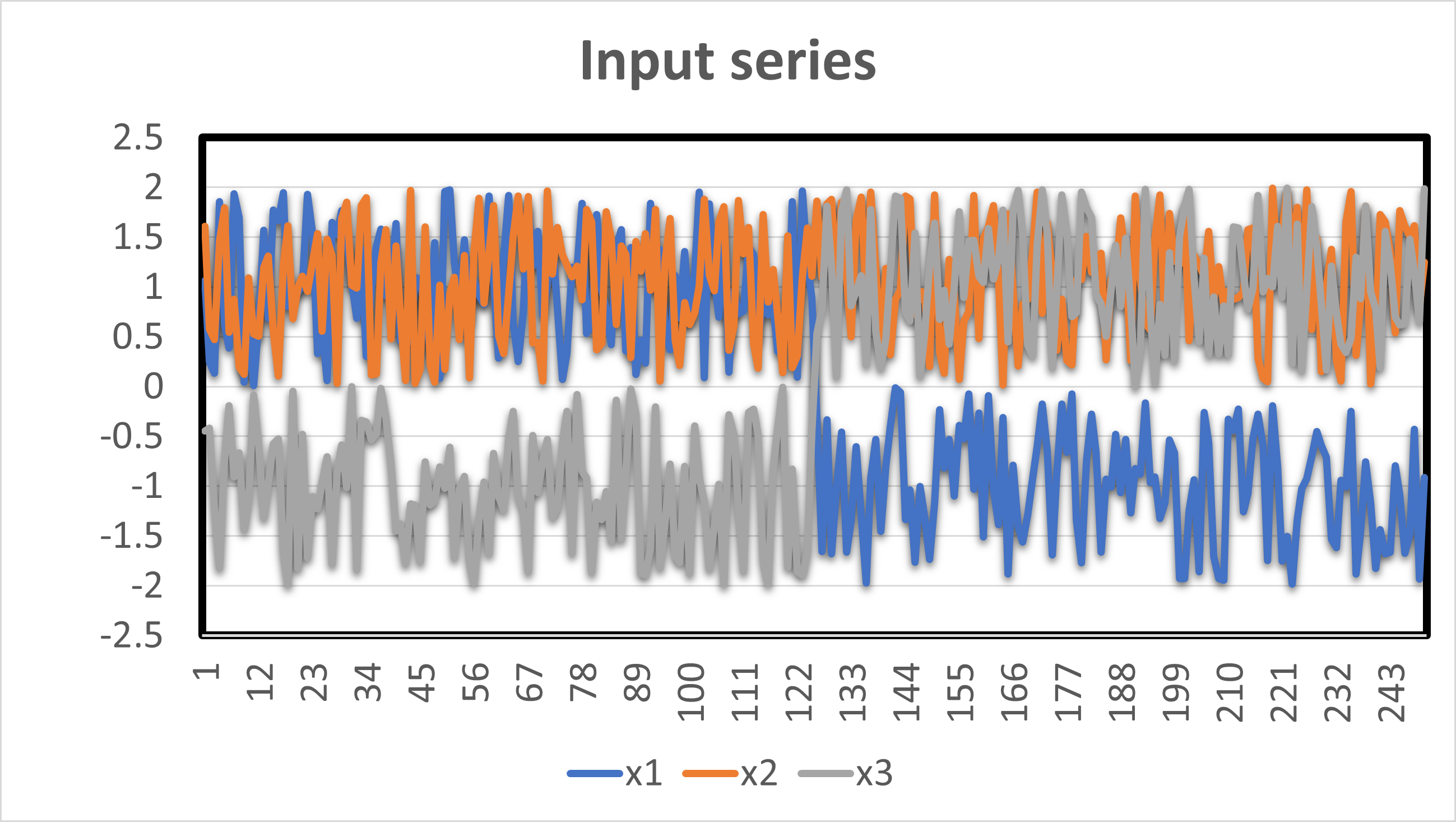
Yuragi learning outputs a confidence level indicating how close the input series is to the information stored in 3 attractors.
Tips
Normalization
Yuragi learning can improve accuracy by normalizing the input series. The “set_norm_prm()” function is prepared for this purpose. In the file of the third argument, the mean value is written on the first line for each dimension of the features, separated by tab characters, and the standard deviation is written on the second line for each dimension of the features, separated by tab characters. Normalization (subtracting the mean and dividing by the standard deviation) is automatically performed when storing the features to attractors and providing input series.
Bayesian filter
The Yuragi Learning program is implemented using the Unscented Kalman Filter (UKF) as a Bayesian filter. A version using a particle filter is also available (now in my private repository), but the computation time increases linearly with the increase in the number of particles.
Multimodal Recognition in the Brain
An extended version of the program that can perform multimodal recognition, as the human brain does, is also available. However, it will be published after the paper is published.
Author
- Daichi Kominami
License
“bayesian-attractor-model-python-cpp-“ is under MIT license.
Enjoy Yuragi learning!
[1] M. Murata and K. Leibnitz, “Fluctuation-Induced Network Control and Learning: Applying the Yuragi Principle of Brain and Biological Systems,” Springer, March 2021.
[2] S. Bitzer, J. Bruineberg, and S. J. Kiebel, “A bayesian attractor model for perceptual decision making,” PLOS Computational Biology, August 2015.